介绍机器人建图中常见的三维地图表达形式。
OcTree 八叉树
论文:Hornung, Armin, et al. “OctoMap: An efficient probabilistic 3D mapping framework based on octrees.” Autonomous robots 34.3 (2013): 189-206.
有关八叉树我已经讲很多了,详见:
$N^3$ tree
论文:J. Chen, D. Bautembach, and S. Izadi, “Scalable real-time volumetric surface reconstruction,” ACM Trans. Graph., vol. 32, no. 4, pp. 113:1– 113:16, Jul. 2013.
$N^3$ tree的数据结构如下图所示:

其思想为:认为空间中大部分区域为free的栅格,因此free的栅格就不用细分。而那些包含surface的栅格可以细分为Level1 与Level2的栅格。Level2的栅格为叶子栅格,保存了tsdf距离。
N3 tree不用octree的原因在于,他认为octree不容易在GPU上实现并行化。
flat hash-tables(Voxel Hashing)
论文:M. Nießner, M. Zollh¨ofer, S. Izadi, and M. Stamminger, “Real-time 3D reconstruction at scale using voxel hashing,” ACMTrans. Graph., vol. 32, 2013, Art. no. 169.
Voxel hashing主要是解决这样一个问题:当在大规模建图的时候,如果事先就给所有的voxel分配内存,则会导致内存爆炸。因此,Voxel hashing选择只保存相机观测到的voxel,将其存入Hash表中。
Voxel hashing的数据结构为:
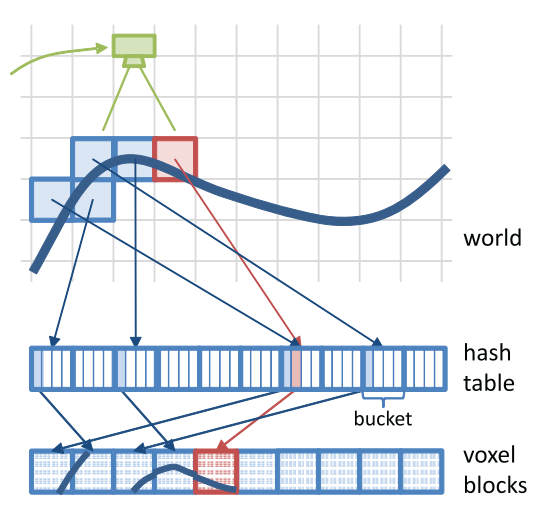
具体而言,将不同的坐标的voxel,用一个hash函数映射到不同的bucket中去。该论文使用了许多技巧来解决发生哈希碰撞时如何提高效率,以及如何根据voxel hashing的地图形式来解决TSDF更新时的问题。
其最终还是类似于Kinect-fusion,TSDF更新的方式与raycast得到重建表面的方式都类似。
SuperEight
论文:Vespa, Emanuele, et al. “Efficient octree-based volumetric SLAM supporting signed-distance and occupancy mapping.” IEEE Robotics and Automation Letters 3.2 (2018): 1144-1151.
SuperEiget的数据结构为:

有点类似于Voxel Hashing,不同于八叉树的是,每个Leaf node里有8x8x8个栅格。这些栅格通过莫顿编码的形式来实现快速查找与分配内存。
相较于八叉树地图,他的优势在于能够更快更方便地查找到某个Voxel的邻节点。
相较于使用TSDF表示表面的地图表征,他的优势在于,能够准确区分以下两种voxel:
- free voxel
- unknown voxel 换言之,TSDF表征的地图里,没有区分free与unknown栅格的概念。