背景
上次提到了激光雷达与相机的标定,由于我毕设用的是速腾的激光雷达,发现标定时直接报错,故在此记录下问题与解决措施,借此详细分析下速腾激光雷达与velodyne激光雷达的异同。
问题分析
标定时接上了robosense的激光雷达,提示点云中的点没有”ring”属性。 那么什么是点的”ring”属性?
有序点云与无序点云
首先介绍下什么是有序点云和无序点云。
有序点云数据集,意味着点云是类似于图像(或者矩阵)的结构,数据分为行和列。这种点云的实例包括立体摄像机和tof摄像机生成的数据。有序数据集的优势在于,预先了解相邻点(和像素点类似)的关系,邻域操作更加高效,这样就加速了计算并降低了PCL中某些算法的成本。
在PCL库中,每个pcl::Pointcloud类型都有两个属性,width与height。借CSDN的话来解释下。
WIDTH –用点的数量表示点云数据集的宽度。根据是有序点云还是无序点云,WIDTH有两层解释: 1)它能确定无序数据集的点云中点的个数(和下面的POINTS一样); 2)它能确定有序点云数据集的宽度(一行中点的数目)。
也就是说,对于无序点云,width等于点云中点的个数,而对于有序点云,width等于每行点云的点的个数。
很显然,激光雷达的点云属于有序点云。
Velodyne 数据类型
然而对有序点云进行操作(降采样、刚体变换)后,有序点云就会变成无序点云。velodyne选择给每个点多加了一个属性ring,详细定义如下:
namespace velodyne_pointcloud
{
struct PointXYZIR
{
PCL_ADD_POINT4D; // quad-word XYZ
float intensity;
uint16_t ring;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW // ensure proper alignment
} EIGEN_ALIGN16;
}; // namespace velodyne_pointcloud
这个ring表示每个点之前属于哪个线的,16线的话,这个值为0~15。并且高度自低向高排列。
为什么会用到ring
之前相机标定时提到过,在点云上画出四条边,拟合四条边为四条直线等等。我们运行程序时,显示的直接就是硬纸板的轮廓让你去框(见下图),怎么做到的呢?
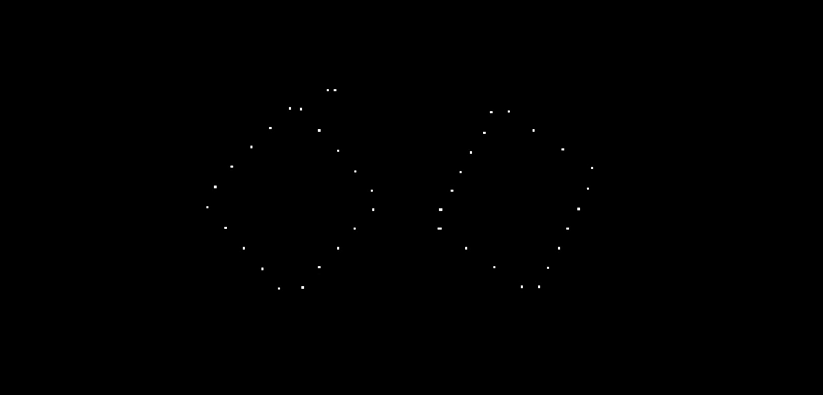
其实就是对激光雷达同一ring的点进行遍历,检测每条线上的点如果有z方向上的突变则保存下来,其余删除。然后就得到了上图。
robosense激光雷达数据类型
然而robosense的点云并没有ring属性,它采用的就是上图说的有序点云的方法,height=16,故没办法直接运行标定程序——它的点云中的点没有ring属性。
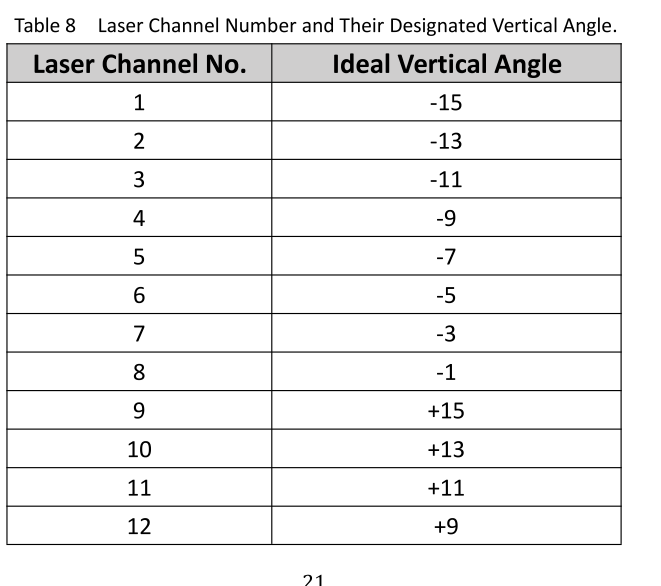
此外,它的线的排列顺序也和velodyne规定的不一样。见下表。
rslidar数据类型向velodyne数据类型转换
为了继续用潘师兄的那个包进行标定,我写了个包将rslidar数据转换为velodyne数据,主要代码见下图:
pcl::PointCloud<pcl::PointXYZI> rs_pc;
pcl::fromROSMsg(*cloud, rs_pc);
rs_pc.height = 16;
pcl::PointCloud<velodyne_pointcloud::PointXYZIR> velo_pc;
for(int i = 0; i < 16; i++)
{
for(int j = 0; j < rs_pc.size() / 16; j++)
{
velodyne_pointcloud::PointXYZIR velo_point;
pcl::PointXYZI& rs_point = rs_pc[j + i * rs_pc.size() / 16];
velo_point.x = rs_point.x;
velo_point.y = rs_point.y;
velo_point.z = rs_point.z;
velo_point.intensity = rs_point.intensity;
velo_point.ring = i < 8 ? i : 16 - (i - 8);
velo_pc.push_back(velo_point);
}
}
代码详见这里。
即接受rslidar的点云,给其加ring属性,转发出去。