背景
在图像上做Object detection 准确率目前可以达到90%以上,而在点云上做端到端的Object detection准确率却很低–车辆大概70%,行人大概40%,并且这样的网络换个不同线数的雷达就不行了。(点云有其特殊性, 近处和远处稠密程度不一样,不同线数的激光雷达稠密程度也不一样)。
但是图像做物体识别却没有办法得到深度信息,于是很自然地,便有了将激光雷达点云上的点投影到相机图像上,借而得到深度的想法。而这样做的第一步就是激光雷达和相机的标定,借而得到相机与激光雷达的坐标系间的转换。
Paper与源码
原理
总结:ICP就完事了。
实验环境
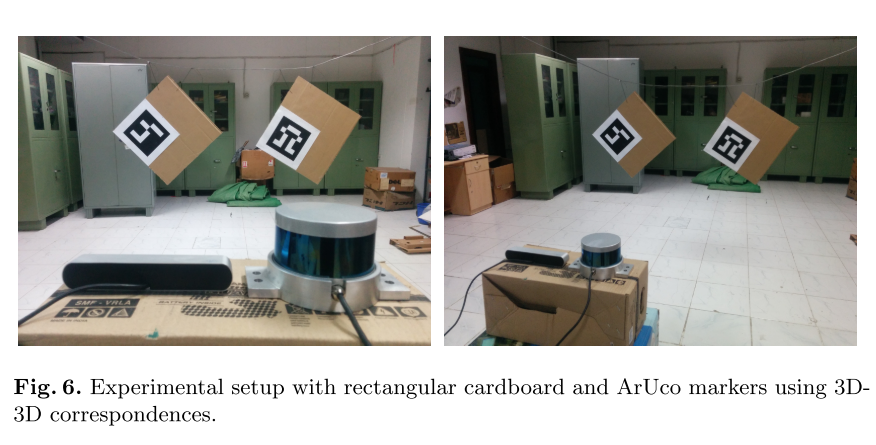
如图,左边是zed双目相机(当单目用),右边是VLP-16。两块硬纸板上装的是Aruco,类似于April tag,单目相机可以很容易通过PnP获得它自身坐标系到相机坐标系的R丨t。
参数
运行程序前需要提前知道的参数:
- 相机分辨率
- 相机内参
- 初始旋转的估计
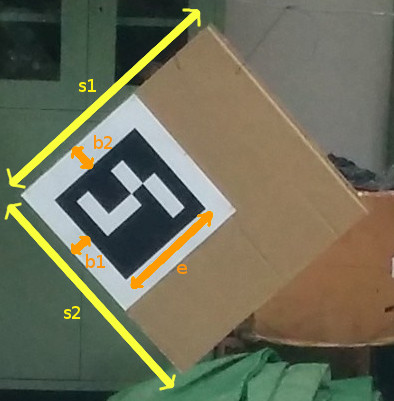 该图标注的距离。
该图标注的距离。
标定细节
- 根据Aruco这个marker确定相机到Aruco坐标系的转换(原理为PnP),然后根据上图那些s1, s2, b1, b2, e等等量出来的距离,确定硬纸板四个角点在相机坐标系的三维坐标。
- 在激光雷达点云中,手点,框出硬纸板的四条边,然后用直线拟合这四条边,每两条边的交点为硬纸板的定点。
- 由1,2得到的四组对应3d点,由于有两个硬纸板,所以有八组对应点,随后用ICP求解两坐标系之间的R丨t。
其他
文章一开始是直接用硬纸板的四个像素点和硬纸板做PnP的,后来发现效果不好(可能是因为他们像素点是手点的),后来才改成这个方法。