TEB中的g2o问题的设置
问题背景
针对阿克曼底盘的导航,TEB_local_planner没有直接给出具体的导航策略,而是利用非线性优化问题完成了对该问题的建模。
g2o问题的表述形式
参照论文[^1]给出非线性优化问题的格式: \(V^{*}(b)=\min _{b} \sum_{k=1}^{n-1} \Delta T_{k}^{2}\) subject to \(\begin{array}{l}{\mathbf{s}_{1}=\mathbf{s}_{s}, \quad \mathbf{s}_{n}=\mathbf{s}_{f}, \quad \Delta T_{k}>0} \\ {\mathbf{h}_{k}\left(\mathbf{s}_{k+1}, \mathbf{s}_{k}\right)=\mathbf{0}} \\ {r_{k}\left(\mathbf{s}_{k+1}, \mathbf{s}_{k}\right) \geq 0} \\ {\mathbf{o}_{k}\left(\mathbf{s}_{k}\right) \geq \mathbf{0}} \\ {\boldsymbol{v}_{k}\left(\mathbf{s}_{k+1}, \mathbf{s}_{k}, \Delta T_{k}\right) \geq \mathbf{0}, \quad(k=1,2, \ldots, n-1)} \\ {\boldsymbol{\alpha}_{k}\left(\mathbf{s}_{k+1}, \mathbf{s}_{k+1}, \mathbf{s}_{k}, \Delta T_{k+1}, \Delta T_{k}\right) \geq \mathbf{0}, \quad(k=2,3, \ldots, n-2)} \\ {\boldsymbol{\alpha}_{1}\left(\mathbf{s}_{2}, \mathbf{s}_{1}, \Delta T_{1}\right) \geq \mathbf{0}, \quad \boldsymbol{\alpha}_{n}\left(\mathbf{s}_{n}, \mathbf{s}_{n-1}, \Delta T_{n-1}\right) \geq \mathbf{0}}\end{array}\)
其中,$b=[s_{1}, \Delta T_{1}, s_{2}, \Delta T_{2}, s_{3}, \ldots, \Delta T_{n-1}, s_{n}]^{\top}$。
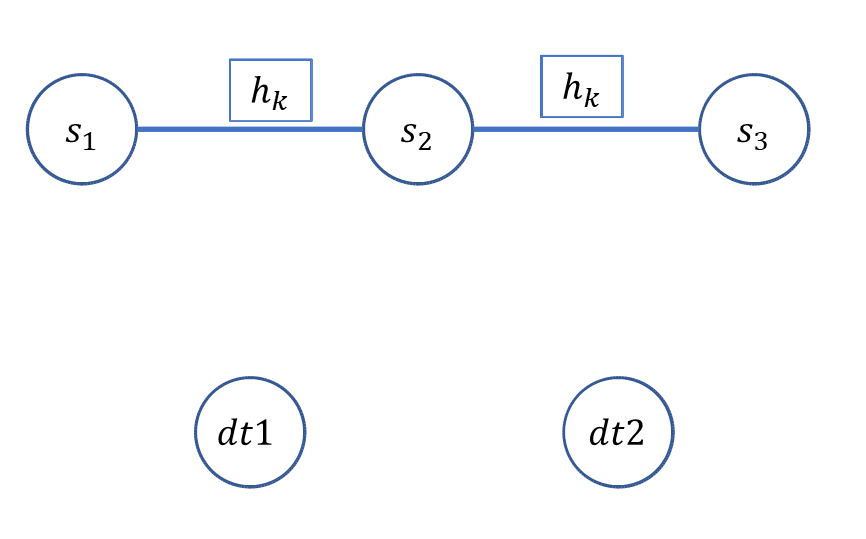
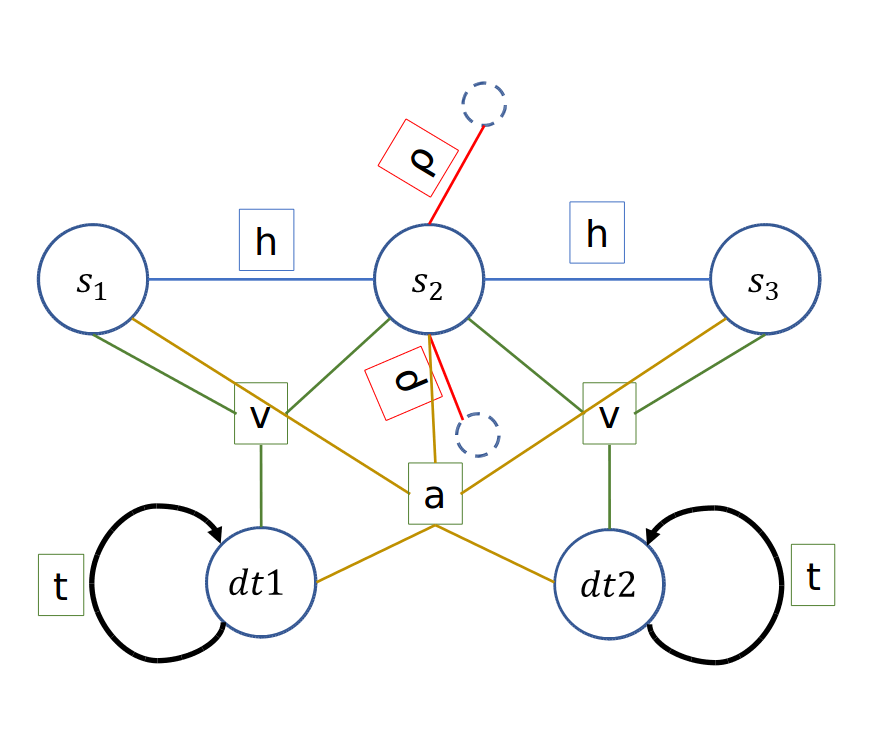
顶点
顶点分为两类:pose与timediff
vetex_pose
- 定义于g2o_types/vetex_pose.h
- 优化变量的数据类型定义为pose_se2,定义于pose_se2.h,由三个分量组成:x,y,theta,优化维度为三维。
- 在Teb初始化的过程中,将起点的Pose与终点的Pose所在的顶点设为fixed,使得g20不对这两个Pose进行优化。
- 初始化某一个TEB时,其路线简单的由起点和终点的连线组成。随后在这条直线上均匀采样点作为待优化的顶点。采样的步长由cfg_->trajectory.min_samples 决定。而 timediff 顶点的初始值为步长除以 cfg_->robot.max_vel_x。每有一个pose顶点就产生一个time_diff顶点。time_diff顶点实际上是每两个Pose之间所需要的时间。
vetex_timediff
- 定义于g20_types/vetex_timediff.h
- 优化变量的数据类型为double。
- 由上所述,其生成在Teb初始化的时候。具体在timed_elastic_band.h/.cpp中的TimedElasticBand::initTrajectoryToGoal中。
边
动力学约束
EdgeKinematicsCarlike
- 定义于g2o_types/edge_time_optimal.h中
- 二元边,观测值维度为2,数据类型为double,连接两个VertexPose
- 误差由文章[^1]中的动力学约束提出。阿克曼底盘模型还增加了最小转弯半径的约束。
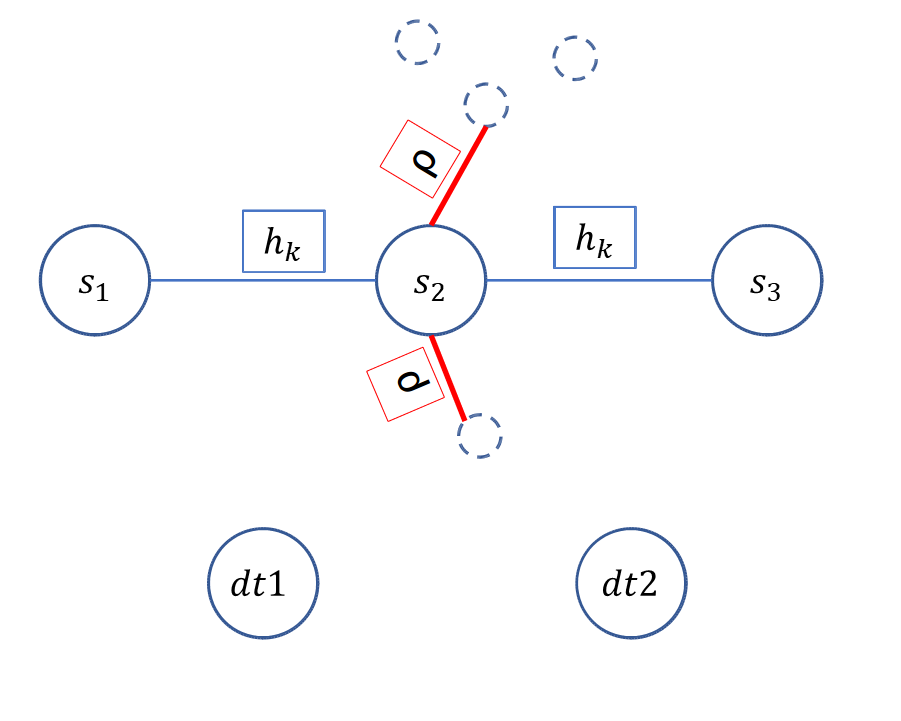
障碍物约束
在AddEdgeObstacle函数中,只将离某个Pose最近的最左边与最右边的两个Obstacle加入优化中。(因为优化路径不会使得路径相对于障碍物的位置关系发生改变)。同时,还设了一个阈值,凡是离该Pose距离低于某个距离的障碍物也一并加入考虑之中。
EdgeObstacle
-
定义于g2o_types/edge_obstacle.h中,当inflated=false时使用此障碍物边
-
一元边,观测值维度为1,测量值类型为Obstacle基类,连接VertexPose顶点
-
存储了某个障碍物的中心点的三维位置,形状与顶点的位置
-
根据机器人的轮廓模型计算当前Pose与某个障碍物的距离
- \[error = dist > min\_obstacle\_dist + \epsilon ? 0 : (min\_obstacle\_dist + \epsilon) - dist\]
- 信息矩阵为cfg_->optim.weight_obstacle * weight_multiplier
EdgeInflatedObstacle
-
定义于g2o_types/edge_obstacle.h中,当inflated=true时使用此障碍物边
-
一元边,观测值维度为2,类型为Obstacle基类,连接VertexPose顶点
- \[error[0] = dist > min\_obstacle\_dist + \epsilon ? 0 : (min\_obstacle\_dist + \epsilon) - dist \\ error[1] = dist > inflation\_dist ? 0 : inflation\_dist - dist \\\]
- 信息矩阵为2x2对角阵,(0,0) = weight_obstacle, (1,1) = weight_inflation
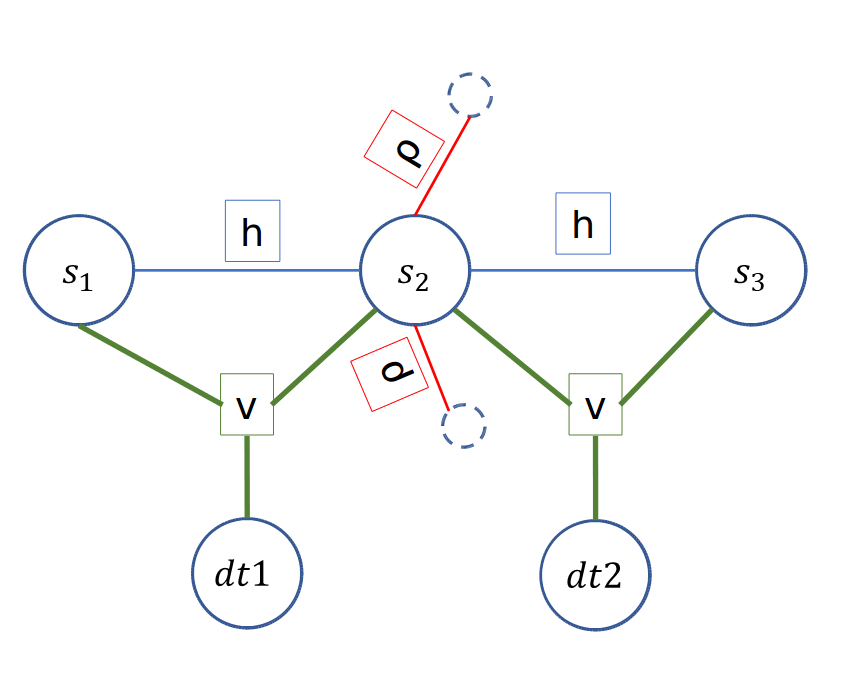
速度约束
EdgeVelocity
- 定义于g2o_types/edge_via_point.h中
- 三元边,观测值变量维度为2,类型为double,连接两个VetexPose与一个VertexTimeDiff
- 速度由两个VetexPose间的距离除以时间得到。角速度由两个VetexPose间的角度除以时间得到
- error有两项,分别是线速度与线速度线速度是否在设定好的区间内。
- 信息矩阵为3x3对角矩阵,(0,0) = weight_max_vel_x, (1,1) = weight_max_vel_y, (2,2) =weight_max_vel_theta(对于全向轮底盘来说)
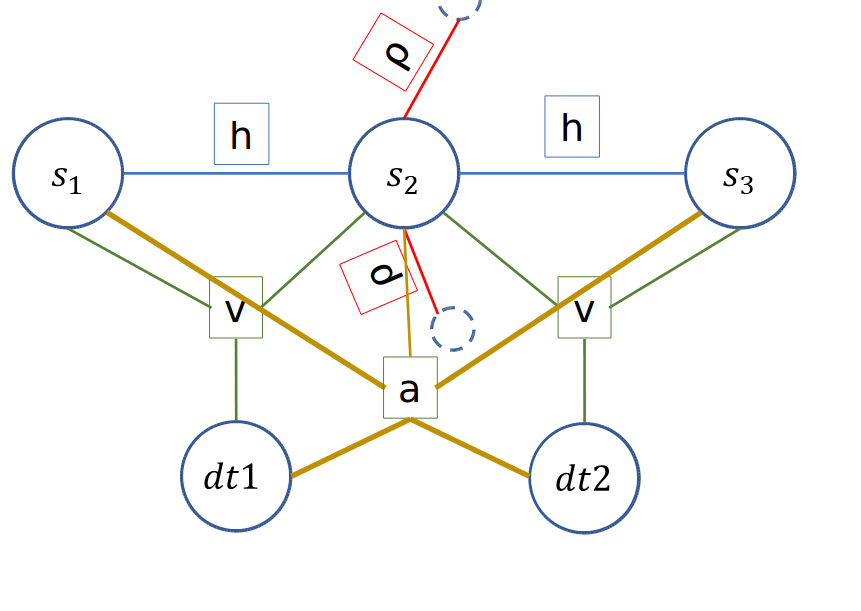
加速度约束
EdgeAcceleration
- 定义于g2o_types/edge_acceleration.h中
- 五元边,观测值维度为2,类型为double,连接三个pose与两个timediff顶点
- 根据三个Pose与两个timediff做两次差分得到线加速度与角加速度。
- error有两项,分别是线加速度与角加速度是否在设定好的区间内。
- 信息矩阵为2x2对角矩阵(对于阿克曼底盘来说),(0,0) =weight_acc_lim_x, (1,1) = weight_acc_lim_theta,
时间最优约束
EdgeTimeOptimal
- 定义于g2o_types/edge_time_optimal.h中
- 一元边,观测值维度为1,数据类型为double,连接一个VertexTimeDiff
- error直接就是连接的VertexTimeDiff的dt本身
- 信息矩阵为1x1矩阵,其值为weight_optimaltime
via_point约束
via_point是一类点,其规定了轨迹应当经过这些点,否则会产生相应的cost。via_point边会与原规划的路径中与其距离最近的Pose顶点相连。
EdgeViaPoint
- 定义于g2o_types/edge_via_point.h中
- 一元边,观测值维度为1,类型为Eigen::Vector2d*,连接VertexPose顶点
- 存储了某个via_point的位置。
- error为其连接的Pose顶点的位置到这个Viapoint的距离的模长。
- 信息矩阵为1x1的矩阵,其值为weight_viapoint
[^1]:Integrated online trajectory planning and optimization in distinctive topologies