实验室新进了两个Livox Horizon激光雷达,特此记录特性。
参数总结
- 10 Hz /s 每帧点云为24000个三维点,非重复式扫描
- FOV: $ 81.7^\circ \times 25.1^\circ$
每帧形状
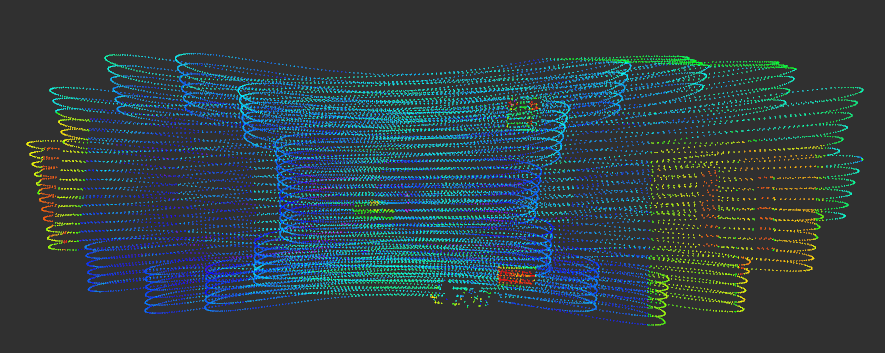
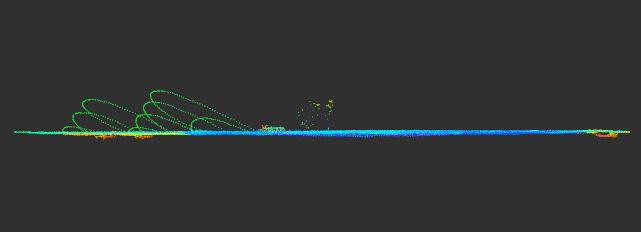
以下为单帧点云扫描到一面白墙的图案
正视图:
俯视图:
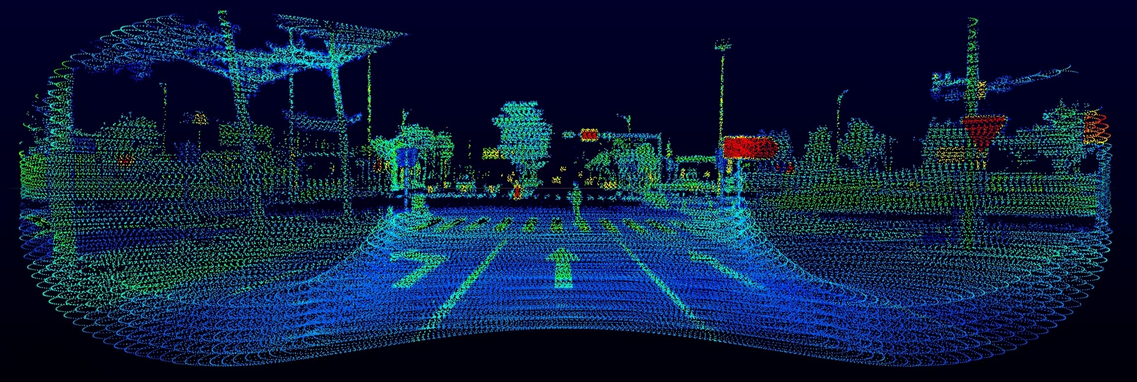
反射率的分辨率
参照manual 上所说的,Livox激光雷达具有0-150级的反射率分辨率,这使得从点云图像上即可分辨出场景中的一些物体,如车道线、红绿灯等:
非重复式扫描
非重复式扫描指的是激光雷达每次扫描的位置都不一样,通过积分可以有效增加其在垂直方向上的分辨率。(具体如何做到的在manual里没有提到)
每帧点云扫描的位置都不同:
单帧点云的扫描顺序
双激光雷达干涉
将两台激光雷达垒在一起后同时使用,单个激光雷达的点云没有受到明显的影响。
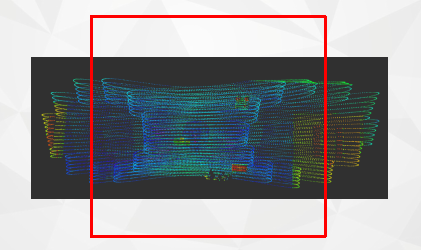
视场角
该激光雷达的视场角与8mm的工业相机的视场角的对比图(红框内为相机视场角):
Loam_livox
由于Livox是非重复式扫描的固态激光雷达,所以以往的基于旋转式的激光雷达的线数特性的SLAM方案接不可用(LOAM, LEGO-LOAM等),需要对以往的算法进行适配才行。
这里有两个工作来进行测试:
- 香港大学的Mars实验室的LOAM_Livox,使用的是Livox Mid 40,与实验室的型号不同
- DJI的livox_horizon_loam(潘志琛师兄写的) 针对Horizon的型号来写的。
测试的数据集为G栋305一条笔直的走廊的来回。
测试结果:
-
loam_livox

-
loam_horizon_livox without imu
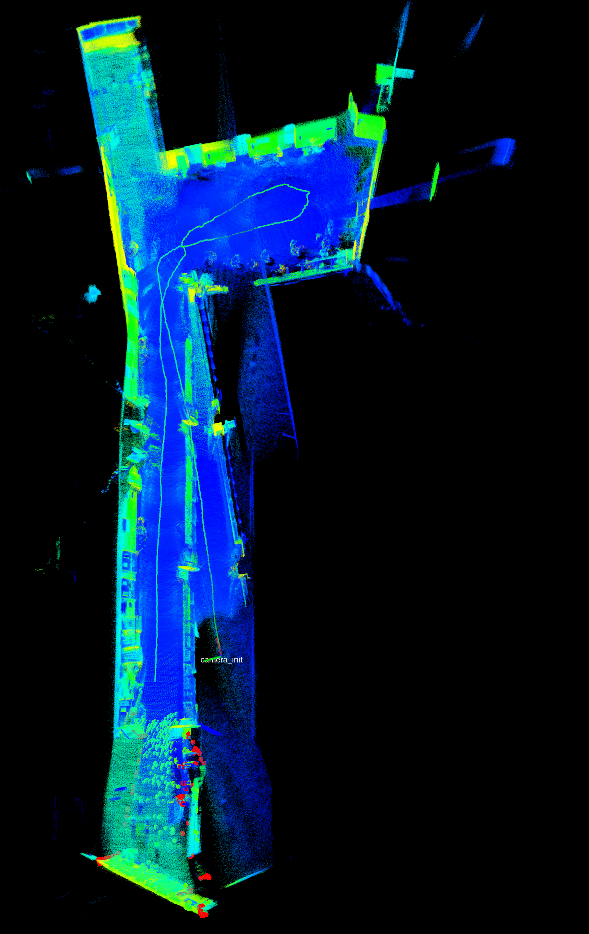
-
loam_horizon_livox with imu
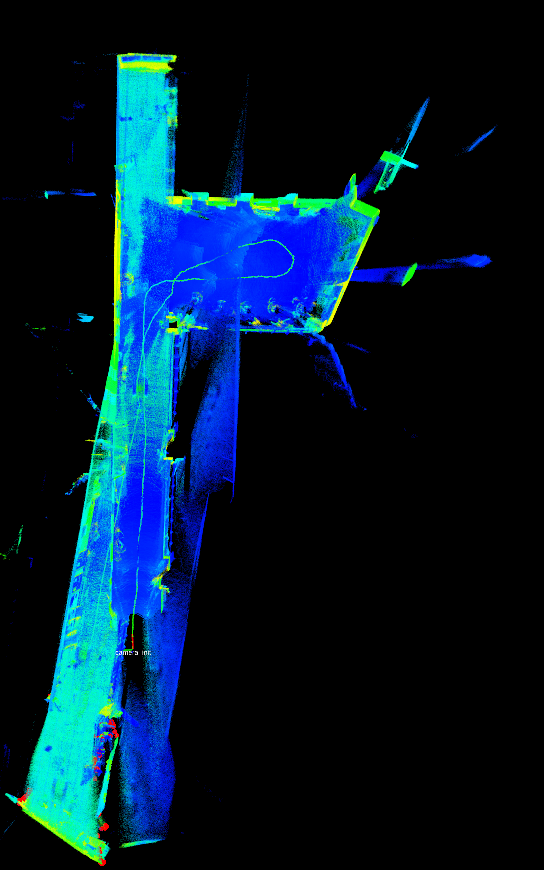
结论:
- LOAM是没有回环的。三种方案在笔直往前走时建图效果都还可以。但是在360度拐弯回头后,角度即发生较大的偏差。推测是Livox视场角太小,旋转角度太大时,能够形成约束的面点和边缘点比较少。
- loam_livox建图效果较差,loam_horizon好一点,用不用imu数据的区别在这个数据集上看不出来。