背景
为什么Error-State Kalman Filter 比 Extend Kalman filter 估计出来的结果更好一些?
Extend Kalman Filter
传统的卡尔曼滤波分为Predict 和Update 部分。
Predict 部分的公式为
\[\begin{aligned} &\hat{\boldsymbol{x}}_{k \mid k-1}=f\left(\hat{\boldsymbol{x}}_{k-1 \mid k-1}, \boldsymbol{u}_{k}\right) \\ &\boldsymbol{P}_{k \mid k-1}=\boldsymbol{F}_{k} \boldsymbol{P}_{k-1 \mid k-1} \boldsymbol{F}_{k}^{\top}+\boldsymbol{Q}_{k} \end{aligned}\]这里的$\boldsymbol{F}_K = \frac{\partial f}{\partial \hat{x}_k}$。
Update 部分的公式为:
\[\begin{aligned} &\tilde{\boldsymbol{y}}_{k}=\boldsymbol{z}_{k}-h\left(\hat{\boldsymbol{x}}_{k \mid k-1}\right) \\ &\boldsymbol{S}_{k}=\boldsymbol{H}_{k} \boldsymbol{P}_{k \mid k-1} \boldsymbol{H}_{k}^{\top}+\boldsymbol{R}_{k} \\ &\boldsymbol{K}_{k}=\boldsymbol{P}_{k \mid k-1} \boldsymbol{H}_{k}^{\top} \boldsymbol{S}_{k}^{-1} \\ &\hat{\boldsymbol{x}}_{k \mid k}=\hat{\boldsymbol{x}}_{k \mid k-1}+\boldsymbol{K}_{k} \tilde{\boldsymbol{y}}_{k} \\ &\boldsymbol{P}_{k \mid k}=\left(\boldsymbol{I}-\boldsymbol{K}_{k} \boldsymbol{H}_{k}\right) \boldsymbol{P}_{k \mid k-1} \end{aligned}\]其中,$\boldsymbol{H}_k = \frac{\partial h}{\partial \hat{x}}$。
Error State Kalman Filter
相对于EKF直接对状态进行估计,其估计的是误差状态:
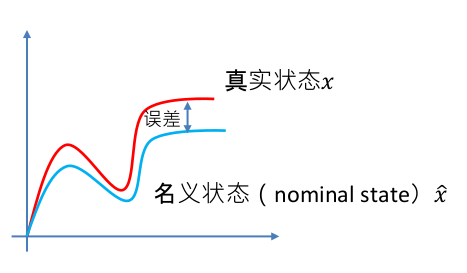
\[\tilde{x} = x - \hat{x}\]其中$\tilde{x}$表示误差状态, $x$表示真实状态,$\hat{x}$表示名义状态(nominal state),这三者的关系可以用下图表示
名义模型(Nominal Model)简单地说就是设计控制器或者进行系统分析时所用的模型,因为真实模型(True Model)在现实中一般难以获得,实际应用中都是通过系统辨识等方法得到被控对象的参数化模型(比如传递函数或状态空间方程)或者非参数化模型(比如频率响应),而这些模型严格意义上来说只是真实模型的一种近似,因此称作名义模型。——知乎
那么,ESKF的Predict过程可以写为:
\[\begin{aligned} &\hat{\boldsymbol{x}}_{k \mid k-1}=f\left(\hat{\boldsymbol{x}}_{k-1 \mid k-1}, \boldsymbol{u}_{k}\right) \\ &\boldsymbol{P}_{k \mid k-1}=\boldsymbol{F}_{k} \boldsymbol{P}_{k-1 \mid k-1} \boldsymbol{F}_{k}^{\top}+\boldsymbol{Q}_{k} \end{aligned}\]这里的\(\boldsymbol{F}_K = \frac{\partial f}{\partial\tilde{x}_k}\),与EKF不同。$\boldsymbol{P}_{k \mid k-1}$ 表示的也是Error State的噪声,而非是名义状态的噪声。
ESKF的Update过程可以表示为: \(\begin{aligned} &\tilde{\boldsymbol{y}}_{k}=\boldsymbol{z}_{k}-h\left(\hat{\boldsymbol{x}}_{k \mid k-1}\right) \\ &\boldsymbol{S}_{k}=\boldsymbol{H}_{k} \boldsymbol{P}_{k \mid k-1} \boldsymbol{H}_{k}^{\top}+\boldsymbol{R}_{k} \\ &\boldsymbol{K}_{k}=\boldsymbol{P}_{k \mid k-1} \boldsymbol{H}_{k}^{\top} \boldsymbol{S}_{k}^{-1} \\ &\tilde{\boldsymbol{x}}_{k \mid k}=0+\boldsymbol{K}_{k} \tilde{\boldsymbol{y}}_{k} \\ &\boldsymbol{P}_{k \mid k}=\left(\boldsymbol{I}-\boldsymbol{K}_{k} \boldsymbol{H}_{k}\right) \boldsymbol{P}_{k \mid k-1} \\ & \boldsymbol{x}_k = \hat{\boldsymbol{x}}_k + \tilde{\boldsymbol{x}}_k \end{aligned}\)
其中,$\boldsymbol{H}_k = \frac{\partial h}{\partial \tilde{x}}$。与EKF中不同。
ESKF的优点
参考文献[1]中所提到的优缺点,我尝试解释为什么ESKF会比EKF得到更加精确的结果。
优点1 ESKF对噪声的刻画更加精确
考虑到EKF的System model 为: \(\dot{\mathbf{x}}(t)=\mathbf{f}(\mathbf{x}(t))\)
这是一个典型的非线性系统。
根据该方程推导ESKF的Sytem model:
\[\begin{aligned} \dot{\mathbf{x}}(t)+\delta \dot{\mathbf{x}}(t) &=\mathbf{f}(\mathbf{x}(t)+\delta \mathbf{x}(t)) \\ \mathbf{f}(\mathbf{x}(t)+\delta \mathbf{x}(t)) &=\mathbf{f}(\mathbf{x}(t))+\nabla \mathbf{f}(\mathbf{x}(t))(\mathbf{x}(t)+\delta \mathbf{x}(t)-\mathbf{x}(t))+\mathcal{O}(t, \mathbf{x}(t), \delta \mathbf{x}(t)) \\ &=\mathbf{f}(\mathbf{x}(t))+\nabla \mathbf{f}(\mathbf{x}(t)) \delta \mathbf{x}(t)+\mathcal{O}(t, \mathbf{x}(t), \delta \mathbf{x}(t)) \\ \dot{\mathbf{x}}(t)+\delta \dot{\mathbf{x}}(t) &=\mathbf{f}(\mathbf{x}(t))+\nabla \mathbf{f}(\mathbf{x}(t)) \delta \mathbf{x}(t)+\mathcal{O}(t, \mathbf{x}(t), \delta \mathbf{x}(t)) \\ \delta \dot{\mathbf{x}}(t) &= F(t) \delta \mathbf{x}(t) \end{aligned}\]这里的$\delta x$也表示error state,与上文$\tilde{x}$同义。
根据推导,因为$F(t)=\frac{\partial f}{\partial \hat{x}}$ 与误差状态无关,因此ESKF的System Model是一个线性时变系统。其线性化程度比EKF要好很多。
从具体的图像中看,如下图所示:
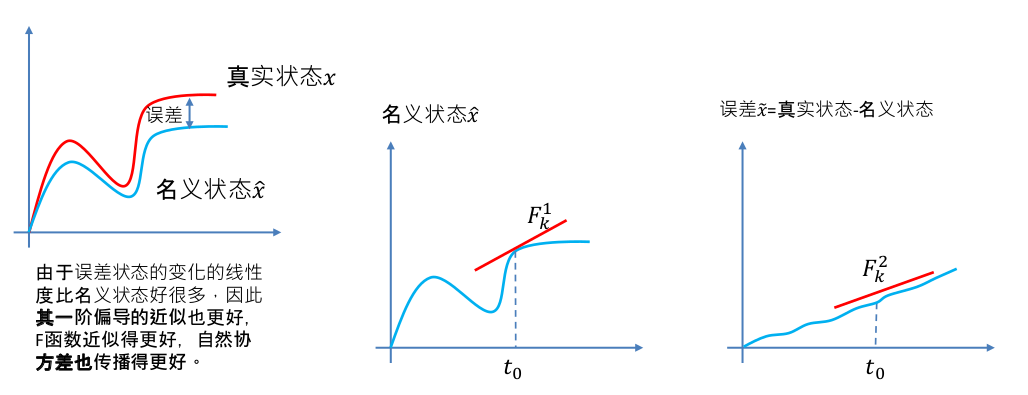
从图中可以看出,EKF在名义状态处线性化,ESKF在Error State处线性化,明显在Error State处线性化的程度更高。
ESKF的状态量更好优化
若状态量里面有旋转,则旋转通常被表示为欧拉角或四元数的形式。
在EKF框架中,若一个旋转状态量:
- 表示为欧拉角,三个参数三个自由度,则在优化的过程中有可能出现万向节死锁的情况。
- 表示为四元数,四个参数三个自由度,需要满足模为1的约束,优化的时候可能 会出现协方差奇异(?)的情况。
但这些问题在ESKF中被弥补。在ESKF中,一个误差旋转变量:
- 表示为欧拉角,在优化的过程中三个角度都在0附近,不用担心万向节死锁的情况出现。
- 表示为四元数,当一个旋转很小的时候,四元数的w=1,同样只要优化三个参数。
参考文献
[1] Madyastha, Venkatesh, et al. “Extended Kalman filter vs. error state Kalman filter for aircraft attitude estimation.” AIAA Guidance, Navigation, and Control Conference. 2011.